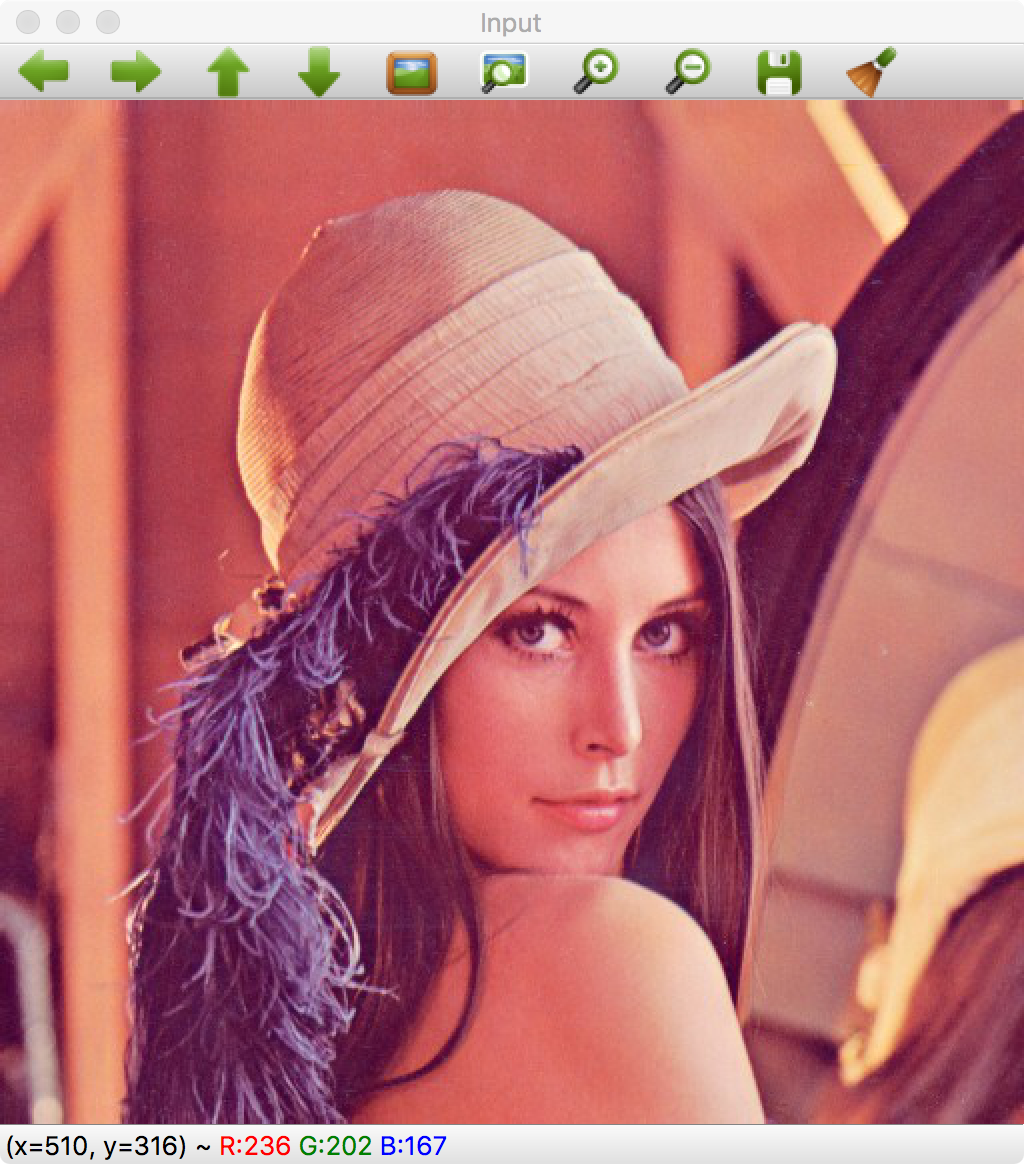
The Original
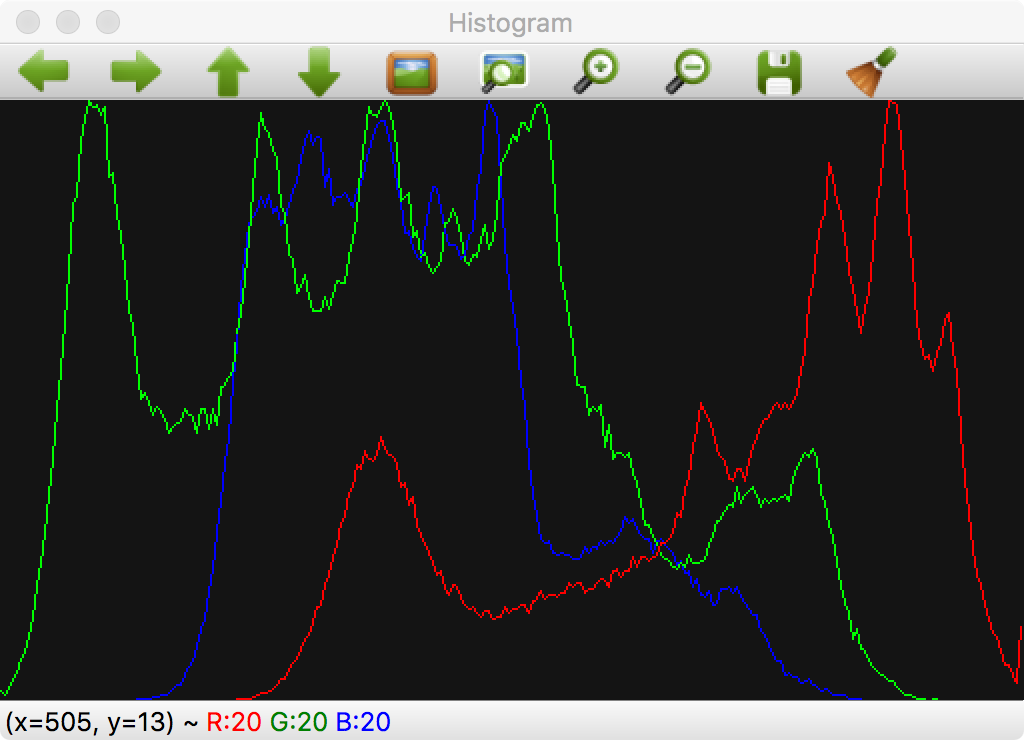
Show histogram
void showHistoCallback(int state, void* userData)
{
// Separate image in BRG
vector bgr;
split( img, bgr );
// Create the histogram for 256 bins
// The number of possibles values
int numbins= 256;
/// Set the ranges ( for B,G,R) )
float range\[\] = { 0, 256 } ;
const float\* histRange = { range };
Mat b\_hist, g\_hist, r\_hist;
calcHist( &bgr\[0\], 1, 0, Mat(), b\_hist, 1, &numbins, &histRange );
calcHist( &bgr\[1\], 1, 0, Mat(), g\_hist, 1, &numbins, &histRange );
calcHist( &bgr\[2\], 1, 0, Mat(), r\_hist, 1, &numbins, &histRange );
// Draw the histogram
// We go to draw lines for each channel
int width= 512;
int height= 300;
// Create image with gray base
Mat histImage( height, width, CV\_8UC3, Scalar(20,20,20) );
// Normalize the histograms to height of image
normalize(b\_hist, b\_hist, 0, height, NORM\_MINMAX );
normalize(g\_hist, g\_hist, 0, height, NORM\_MINMAX );
normalize(r\_hist, r\_hist, 0, height, NORM\_MINMAX );
int binStep= cvRound((float)width/(float)numbins);
for( int i=1; i< numbins; i++)
{
line( histImage,
Point( binStep\*(i-1), height-cvRound(b\_hist.at(i-1) ) ),
Point( binStep\*(i), height-cvRound(b\_hist.at(i) ) ),
Scalar(255,0,0)
);
line( histImage,
Point( binStep\*(i-1), height-cvRound(g\_hist.at(i-1) ) ),
Point( binStep\*(i), height-cvRound(g\_hist.at(i) ) ),
Scalar(0,255,0)
);
line( histImage,
Point( binStep\*(i-1), height-cvRound(r\_hist.at(i-1) ) ),
Point( binStep\*(i), height-cvRound(r\_hist.at(i) ) ),
Scalar(0,0,255)
);
}
imshow("Histogram", histImage);
}
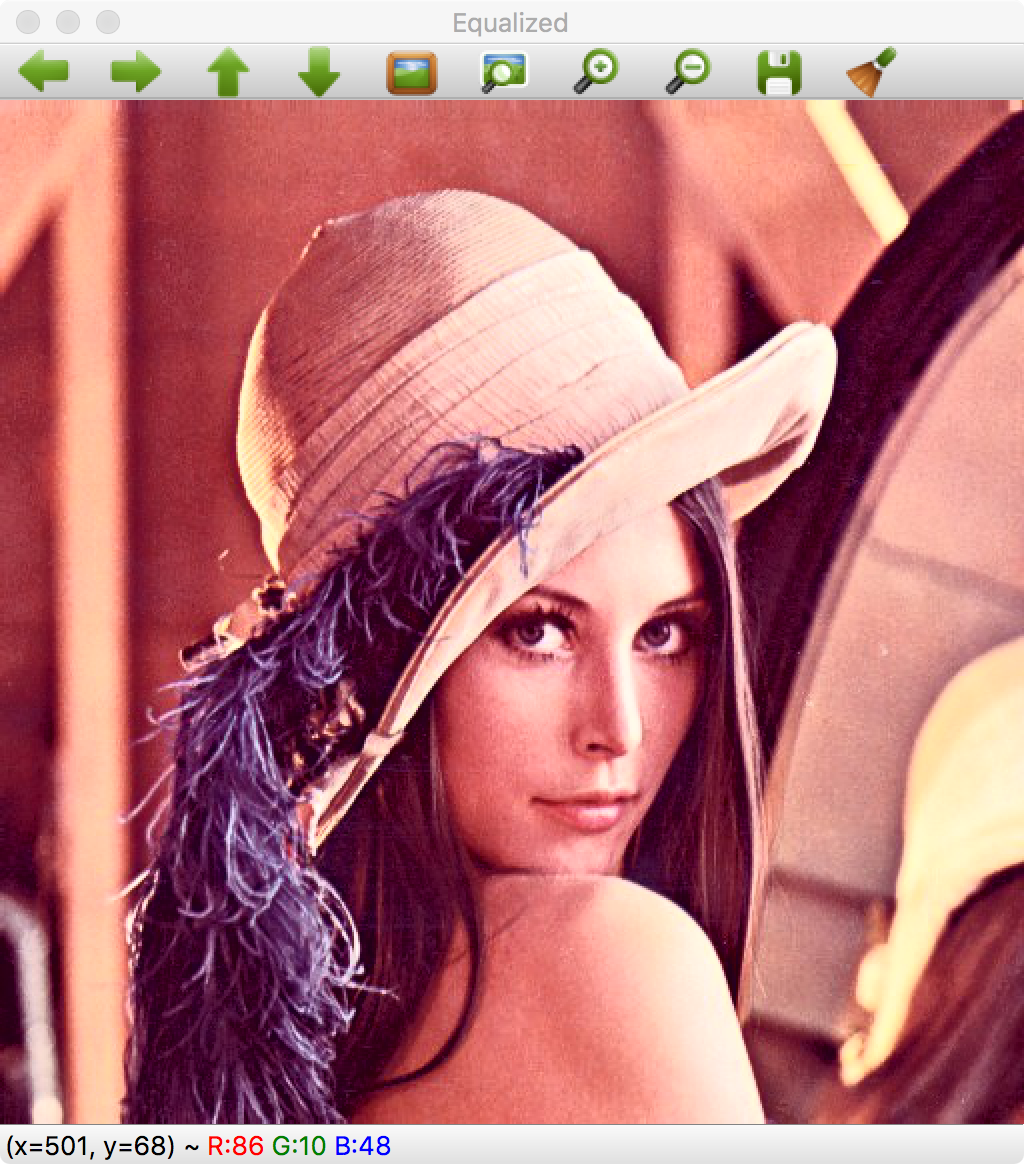
Equalize histogram
void equalizeCallback(int state, void* userData)
{
Mat result;
// Convert BGR image to YCbCr
Mat ycrcb;
cvtColor( img, ycrcb, COLOR_BGR2YCrCb);
// Split image into channels
vector channels;
split( ycrcb, channels );
// Equalize the Y channel only
equalizeHist( channels\[0\], channels\[0\] );
// Merge the result channels
merge( channels, ycrcb );
// Convert color ycrcb to BGR
cvtColor( ycrcb, result, COLOR\_YCrCb2BGR );
// Show image
imshow("Equalized", result);
}
Lomography effect
void lomoCallback(int state, void* userData)
{
Mat result;
const double E = std::exp(1.0);
// Create Lookup table for color curve effect
Mat lut(1, 256, CV\_8UC1);
for (int i=0; i<256; i++)
{
float x= (float)i/256.0;
lut.at(i)= cvRound( 256 \* (1/(1 + pow(E, -((x-0.5)/0.1)) )) );
}
// Split the image channels and apply curve transform only to red channel
vector bgr;
split(img, bgr);
LUT(bgr\[2\], lut, bgr\[2\]);
// merge result
merge(bgr, result);
// Create image for halo dark
Mat halo( img.rows, img.cols, CV\_32FC3, Scalar(0.3,0.3,0.3) );
// Create circle
circle(halo, Point(img.cols/2, img.rows/2), img.cols/3, Scalar(1,1,1), -1);
blur(halo, halo, Size(img.cols/3, img.cols/3));
// Convert the result to float to allow multiply by 1 factor
Mat resultf;
result.convertTo(resultf, CV\_32FC3);
// Multiply our result with halo
multiply(resultf, halo, resultf);
// convert to 8 bits
resultf.convertTo(result, CV\_8UC3);
// show result
imshow("Lomograpy", result);
// Release mat memory
halo.release();
resultf.release();
lut.release();
bgr\[0\].release();
bgr\[1\].release();
bgr\[2\].release();
}

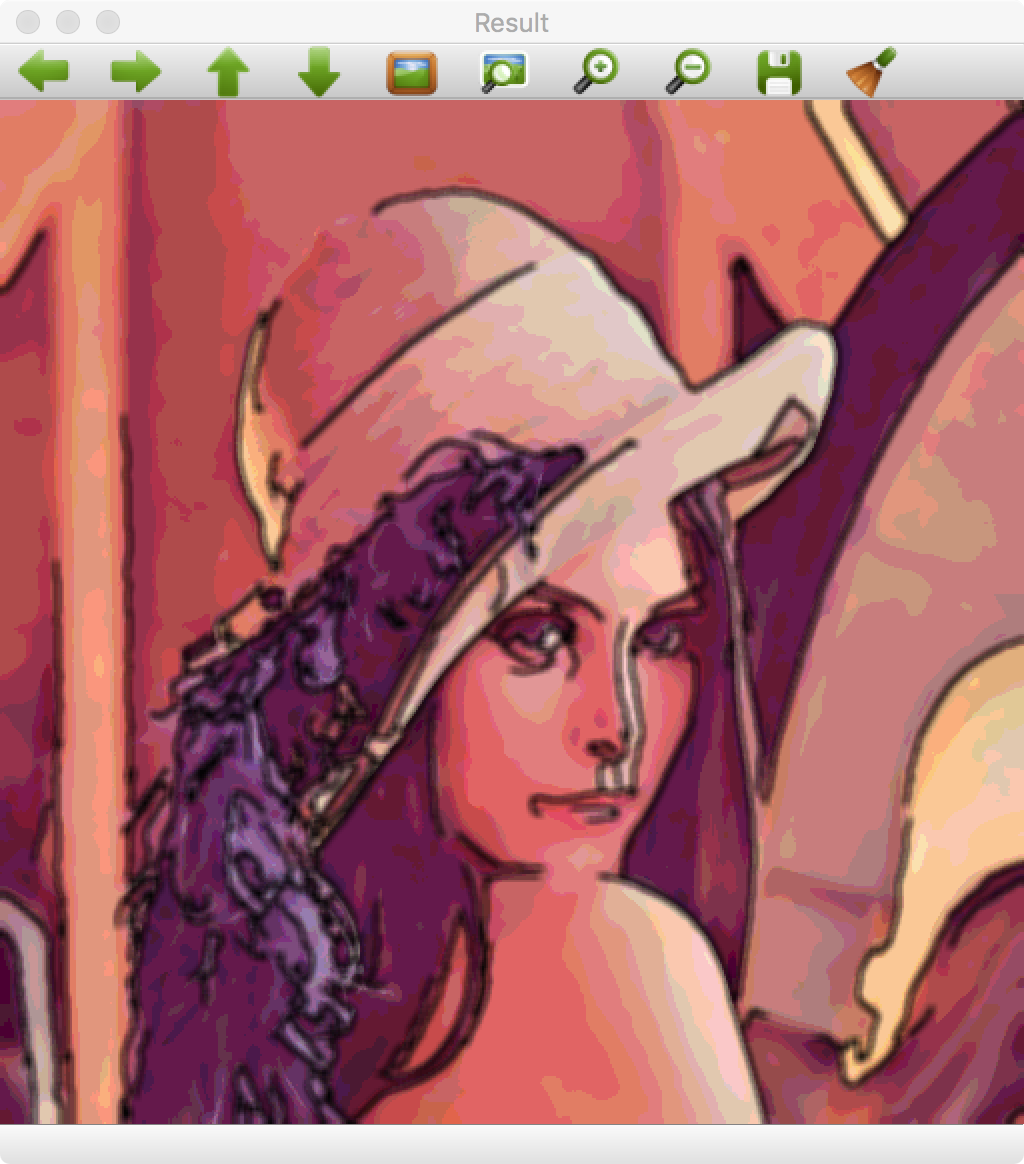
Cartoonize effect
void cartoonCallback(int state, void* userData)
{
/** EDGES **/
// Apply median filter to remove possible noise
Mat imgMedian;
medianBlur(img, imgMedian, 7);
// Detect edges with canny
Mat imgCanny;
Canny(imgMedian, imgCanny, 50, 150);
// Dilate the edges
Mat kernel= getStructuringElement(MORPH\_RECT, Size(2,2));
dilate(imgCanny, imgCanny, kernel);
// Scale edges values to 1 and invert values
imgCanny= imgCanny/255;
imgCanny= 1-imgCanny;
// Use float values to allow multiply between 0 and 1
Mat imgCannyf;
imgCanny.convertTo(imgCannyf, CV\_32FC3);
// Blur the edgest to do smooth effect
blur(imgCannyf, imgCannyf, Size(5,5));
/\*\* COLOR \*\*/
// Apply bilateral filter to homogenizes color
Mat imgBF;
bilateralFilter(img, imgBF, 9, 150.0, 150.0);
// truncate colors
Mat result= imgBF/25;
result= result\*25;
/\*\* MERGES COLOR + EDGES \*\*/
// Create a 3 channles for edges
Mat imgCanny3c;
Mat cannyChannels\[\]={ imgCannyf, imgCannyf, imgCannyf};
merge(cannyChannels, 3, imgCanny3c);
// Convert color result to float
Mat resultf;
result.convertTo(resultf, CV\_32FC3);
// Multiply color and edges matrices
multiply(resultf, imgCanny3c, resultf);
// convert to 8 bits color
resultf.convertTo(result, CV\_8UC3);
// Show image
imshow("Result", result);
}