R语言教程-矩阵、数组
R语言教程-列表
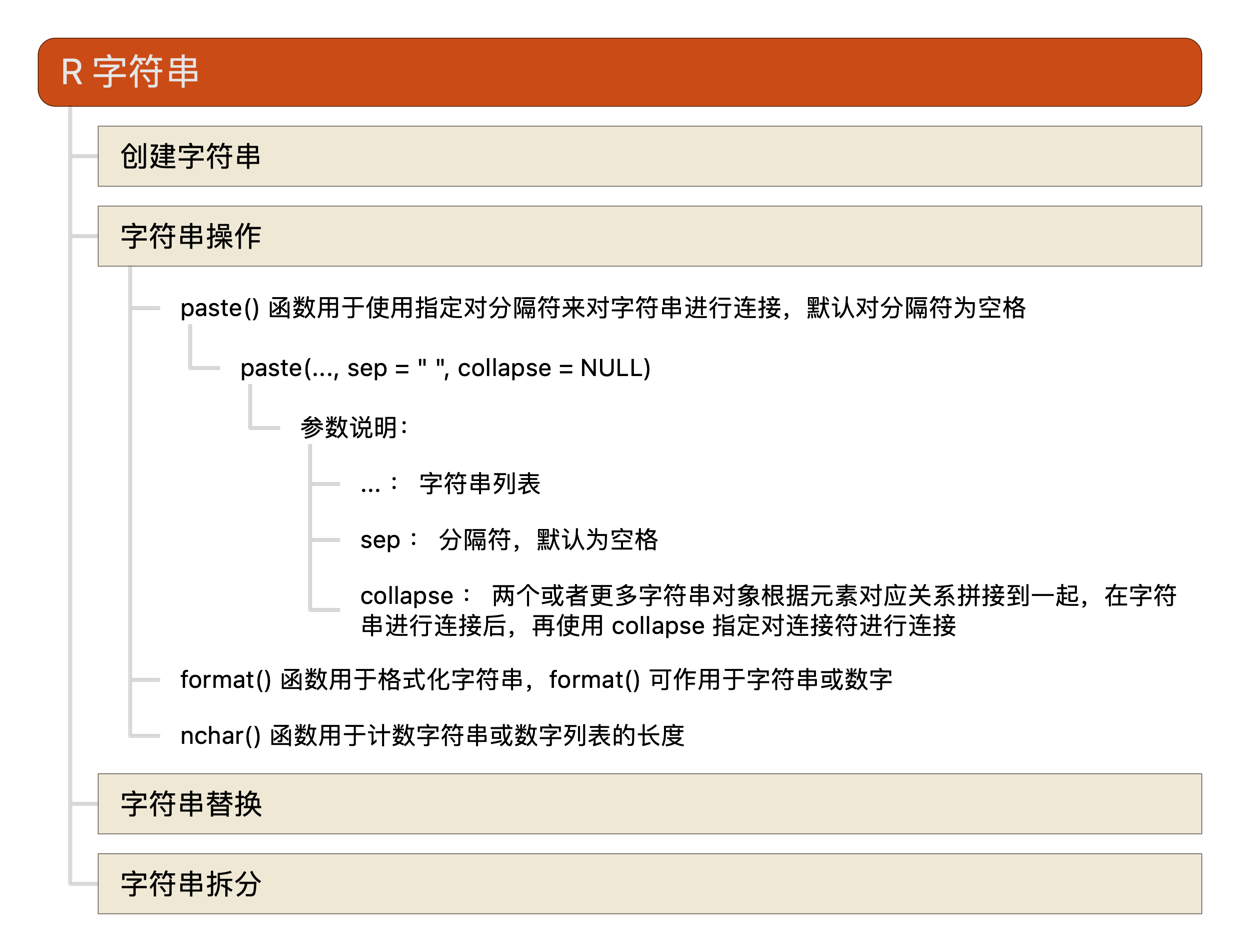
R语言教程-字符串
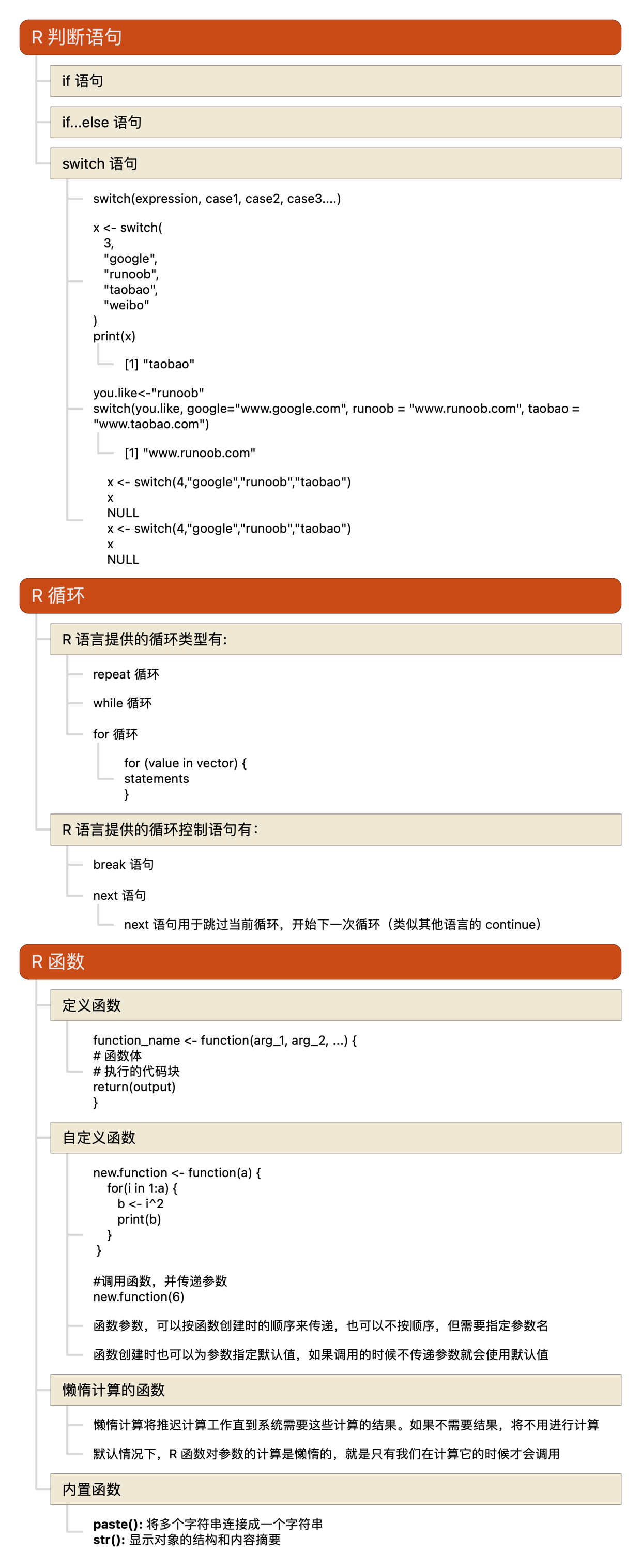
R语言教程-判断语句、循环、函数
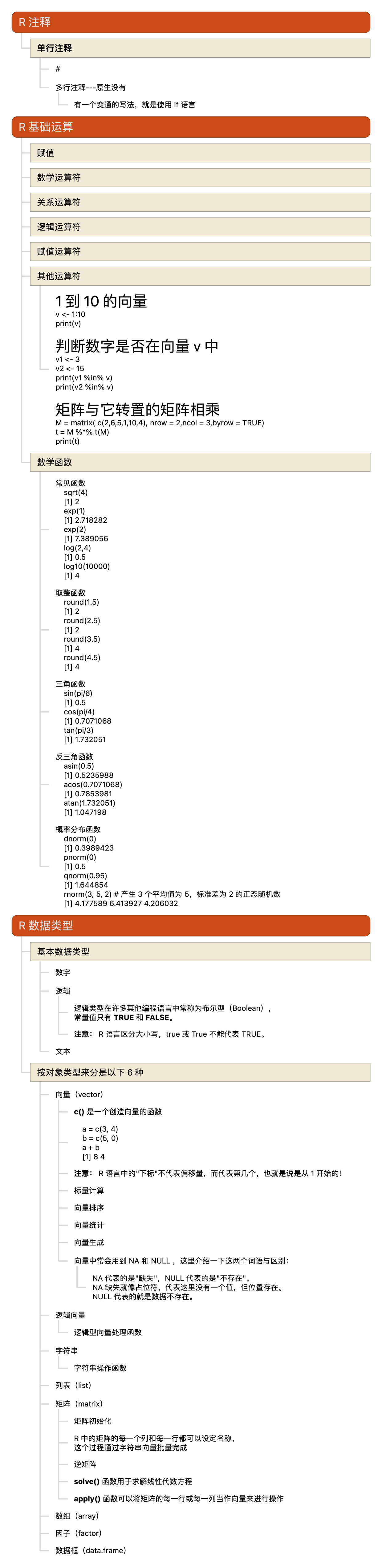
R语言教程-注释、基础运算、数据类型
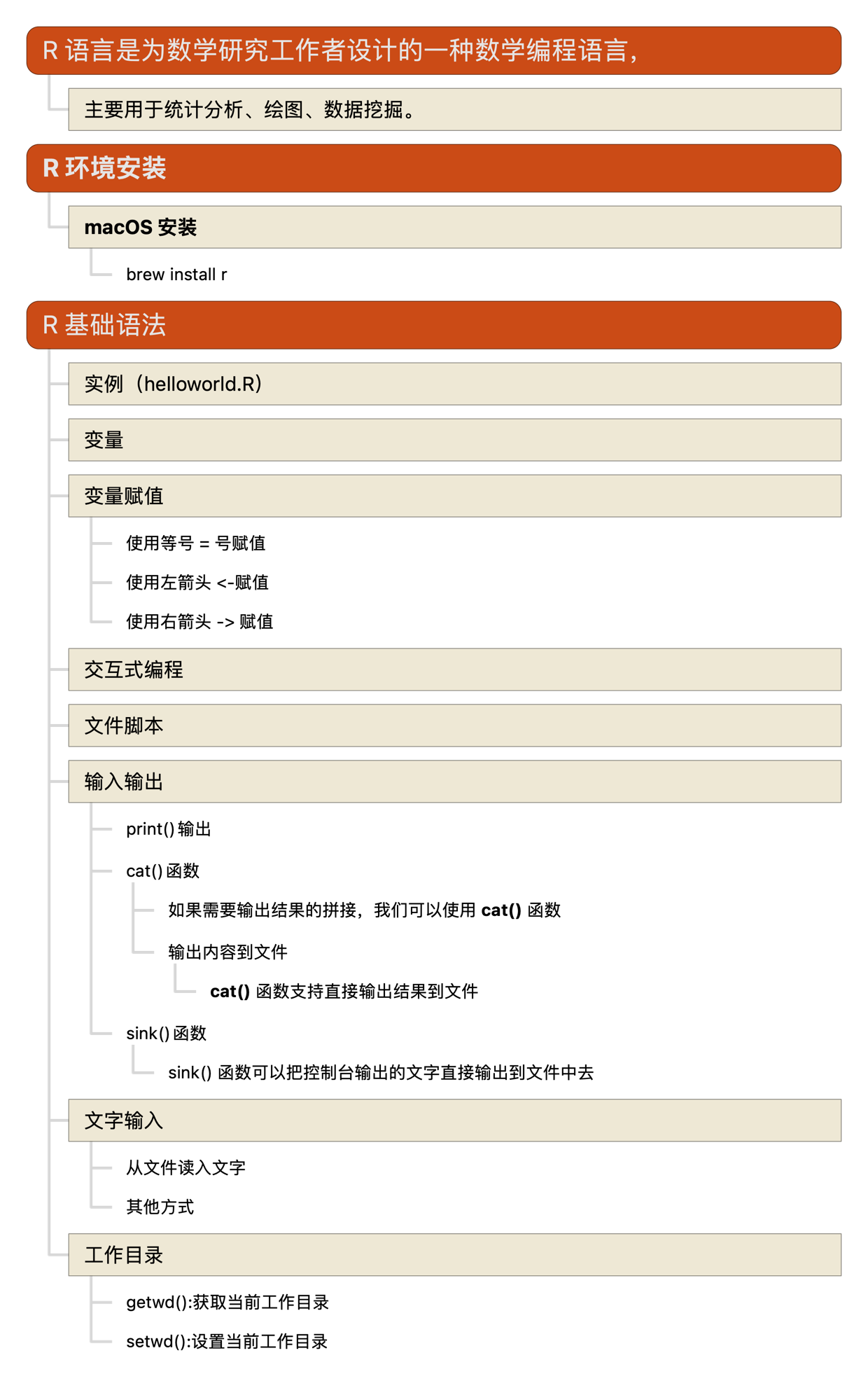
R语言教程-环境安装、基础语法
Hello World
Welcome to Hexo! This is your very first post. Check documentation for more info. If you get any problems when using Hexo, you can find the answer in troubleshooting or you can ask me on GitHub.
Quick Start
Create a new post
1 | $ hexo new "My New Post" |
More info: Writing
Run server
1 | $ hexo server |
More info: Server
Generate static files
1 | $ hexo generate |
More info: Generating
Deploy to remote sites
1 | $ hexo deploy |
More info: Deployment
Test-Hexo

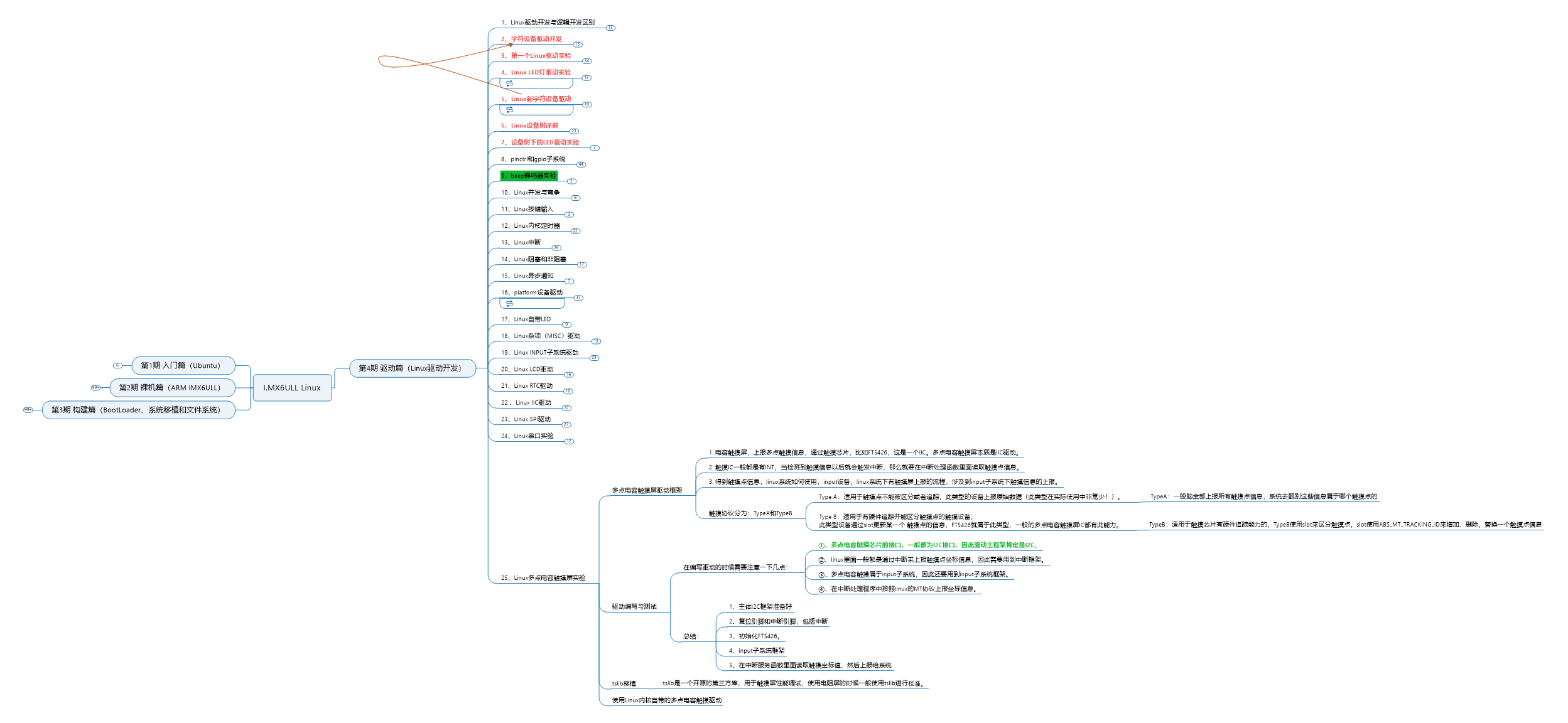
I.MX6ULL Linux 驱动篇